Assoc. Prof. Dr. Emre Ugur and CoLoRs Lab’s project proposal
“Learning multilevel abstractions for robotic planning”
will be funded by TUBITAK 1001 - The Scientific and Technological Research Projects Funding Program.
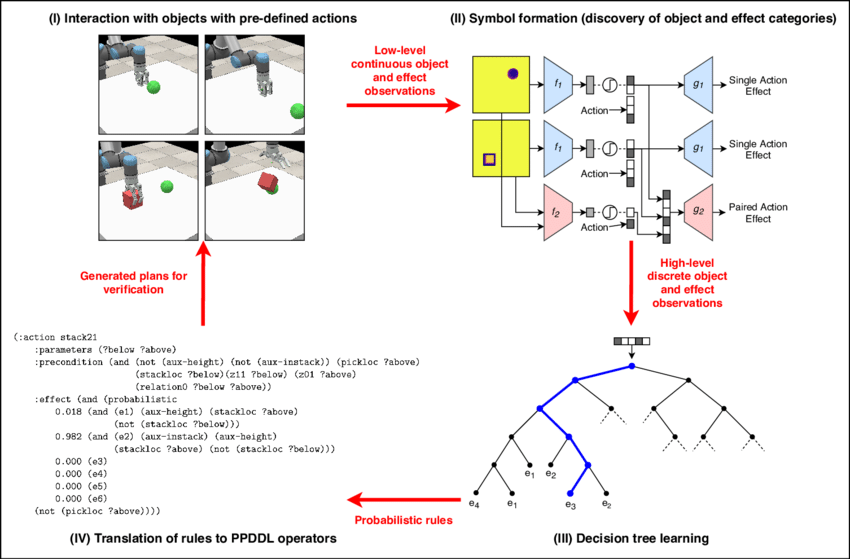
In this project, we propose a lifelong cognitive robot architecture that can make, verify and monitor the plans with learnable multi-level abstractions. In this project, we realize mechanisms for the robots that enable them to discover both high-level low-dimensional discrete object and action primitives and their associated operators and to learn low-level high-dimensional continuous predictive models that are used in both high and low-level planning and verification.
Intelligent robots require the planning ability to perform given complex tasks. The agents should use abstract, discrete rules and operators to accomplish complex, highly complex tasks and be able to make high-level plans with these operators. For example, a thirsty agent should have the capacity to make a high-level plan such as “open the cupboard, take the glass from the drawer, fill it with water, and hand over the glass” to meet his/her needs. Furthermore, the accuracy of this general plan should be monitored and verified both during the initial plan generation stage and during the execution of the plan.
Although symbolic high-level information such as drawers, glasses, and other agents may be perceived in the current environment, the robot may need to make judgments based on more detailed contextual information such as the accessibility of the cupboard, the grip-ability of the glass, and the reachability of the person. Moreover, they need to verify the accuracy of the plan with lower-level, almost sensor-level predictive models. In cases where the plan cannot be verified through low-level predictors, mechanisms should be provided to generate other high-level plans, and in cases where generating high-level plans fails, new plans should be made with low-level predictor-based operators. For example, in a situation where the cupboard is not accessible, pulling the glass towards oneself with a perceived handle and then holding it is only possible with lower-level planners that can utilize continuous information in the environment. Finally, the effects of applied plans at each step in the environment need to be compared with the predicted effects, for which both high and low-level predictive models need to be used.